
![]() ما تزال الطاقة الشمسية تحظى بسمعة ضعيفة كوسيلة من وسائل التوسع في استخدام الطاقات المتجددة كطاقة بديلة. عند استخدام نظام ملاحقة شمسية سنضمن انتاج كمية أكبرمن الطاقة الكهربائية وذلك بسبب بقاء مصفوفة الخلايا الشمسية على محاذاة من أشعة الشمس طوال فترة سطوعها. إن هذا المشروع الذي تم تصميمه في جامعة ولاية كليفلاند الامريكية تضمن تصميم وانشاء نظام ملاحقة شمسية يعتمد على المتحكمات الميكروية. تم معالجة النظام ومكوناته العملية بشكل كامل وايضا تم تقييم التصميم نظرياً وشرح مبدأ عمله. وأخيرا ناقش المشروع المشاكل التي يمكن أن نواجهها وبعض الحلول البديلة والتحسينات التي يمكن القيام بها.
ما تزال الطاقة الشمسية تحظى بسمعة ضعيفة كوسيلة من وسائل التوسع في استخدام الطاقات المتجددة كطاقة بديلة. عند استخدام نظام ملاحقة شمسية سنضمن انتاج كمية أكبرمن الطاقة الكهربائية وذلك بسبب بقاء مصفوفة الخلايا الشمسية على محاذاة من أشعة الشمس طوال فترة سطوعها. إن هذا المشروع الذي تم تصميمه في جامعة ولاية كليفلاند الامريكية تضمن تصميم وانشاء نظام ملاحقة شمسية يعتمد على المتحكمات الميكروية. تم معالجة النظام ومكوناته العملية بشكل كامل وايضا تم تقييم التصميم نظرياً وشرح مبدأ عمله. وأخيرا ناقش المشروع المشاكل التي يمكن أن نواجهها وبعض الحلول البديلة والتحسينات التي يمكن القيام بها.
إن حلول الطاقات المتجددة تصبح ذات شهرة أكبر وكفاءة اعلى بشكل متزايد مع الزمن. والخلايا الشمسية ليست إلا مثال على ذلك.
إن رفع قيمة خرج الخلايا الشمسية الى قيمة عظمى هو أمرُ مرغوب به وذلك لرفع المردود للخلايا الشمسية إلى قيمة اعلى. احد الطرق للحصول على كمية اشعاع اكبر هي ان تكون الخلايا الشمسية بمواجهة الشمس دوما باستخدام ما يسمى نظام ملاحقة شمسي (نظام التتبع الشمسي).هذا الحل يعتبر غالباً اقتصادي أكثر بكثير من شراء عدد أكبر من الخلايا من أجل الحصول على خرج أعلى. ولقد تم التقدير بأنه حصيلة ما تولده الخلايا الشمسية يمكن أن يزداد بين قيم تتراوح بين الـ 30 و الـ 60 % عندما نستخدم أجهزة ملاحقة شمسية عن القيمة التي نحصل عليها عند استخدام خلايا ثابتة. ويتناول هذه المشروع تصميم احد هذه الأنظمة للحصول على أعظم مردود.
ويبدأ هذا المشروع بعرض خلفية عن الحساسات الضوئية والمحركات الخطوية من ناحية تتعلق بالمشروع. ويتابع المشروع بشرح منهجية تصميم معينة تتعلق بـ الخلايا الضوئية, المحركات الخطوية ودارات القيادة لها, اختيار المتحكمات المايكروية تنظيم التوتر, البنية الفيزيائية, وشرح عن نظام العمل البرمجي المستخدم في النظام. ويخرج المشروع بتوصيات من أجل تطوير هذا النظام إلى نظام مستقبلي أفضل.
1- الحساسات الضوئية:
الحساسات الضوئية هي من أكثر أنواع الحساسات انتشاراً. و أبسط أنواع الحساسات الضوئية هو عبارة عن مقاومة ضوئية ,التي يمكن أن تكون من نوع كبرتيد الكادميوم (CdS) أو زرنيخ الغاليوم (Ga As). أما الأنوع الأكثر تعقيداً فهي عبارة عن ديود ضوئي متبع بـترانزستور ضوئي.
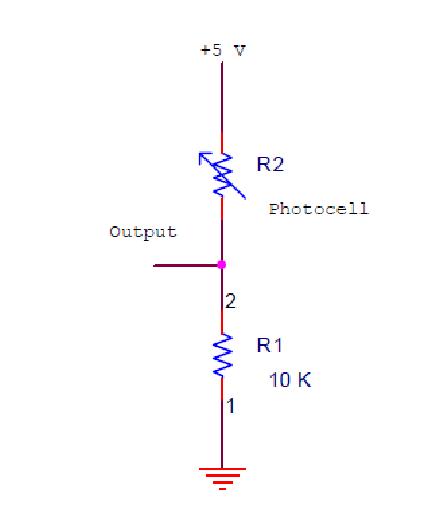
جهاز التتبع الشمسي يستخدم خلية ضوئية من نوع كبريتيد الكادميوم من أجل التحسس للضوء وهذا النوع من الحساسات هو الأرخص ثمناً والأقل تعقيداً, هذا النوع من الخلايا هي من العناصر السالبة التي مقاومتها تتناسب عكسأ مع كمية الضوء الساقط عليه. ومن أجل اعداد هذه الخلية توصل على التسلسل مع مقاومة. وبالتالي ينشأ لدينا
مجزء كمون والخرج عند الوصلة يحدد عندها من مجموع المقاومتين. الشكل التالي يوضح الدارة المكافئة.
في هذا المشروع كان الرغبة هي رفع توتر الخرج عند زيادة شدة الضوء لذا تم وضع الخلية الضوئية في الأعلى.
2-المحرك الخطوي وطريقة التحكم به:
يستخدم عادة المحرك الخطوي من أجل طبيقات التحريك الدقيقة. وجميع هذه المحركات تمتاز بخمس صفات أساسية مشتركة والتي تجعلها المثالية من أجل مثل هذه العملية.
· ليس لها مسفرات.
· لا تتعلق بالحمل.
· لها امكانية التموضع والتوقف عند اي زاوية.
· عزم كبح قوي .
· خصائص استجابة ممتازة.
ان هذه المحركات لها ثلاثة أنواع وهي: ذات المغانط الدائمة, ذات الممانعة المتغيرة والنوع الهجين.
إن طريقة ترتيب الملفات على الجزء الثابت هي الشيء الذي يميز كل نوع من الأنواع الثلاثة. المحركات ذات الأقطاب الدائمة ممكن أن تملك ملفات أحادية القطب أو ملفات ثنائية القطبية كمغانط.
عادة تستخدم أجهزة التتبع الشمسي محركات خطوية ذات قطب واحد ” أحادية القطبية ” وسيقتصر الشرح على هذا النوع من المحركات. المحركات الأحادية القطبية تملك وشيعتان ولك منهما نقطة وسط كما هو مبين بالشكل.
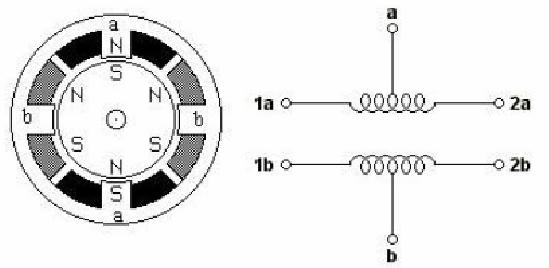
يتم ربط نقطة الوسط إلى طرف تغذية موجب بينما يتم ربط نهايتي الوشيعة إلى الطرف الأرضي من أجل تشكيل حقلين كهربائين متعاكسينفي كل منتصف من الوشيعة.
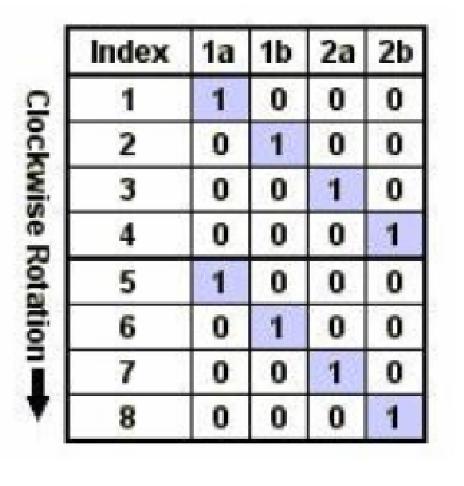
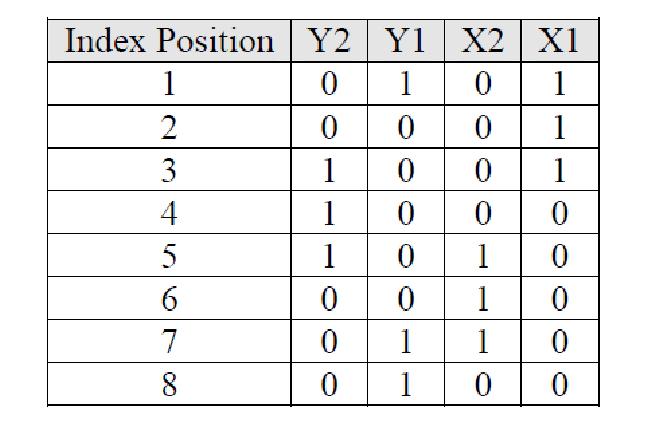
الشكل التالي يوضح طريقة أعطاء التغذية لمحرك خطوي ذو أربع خطوات أن عدد الخطوات يساوي ضعف عدد الوشائع ويتم تدوير المحرك عن طريق تطبيق توتر على الوشائع بتتابع كالموضح بالجدول التالي:
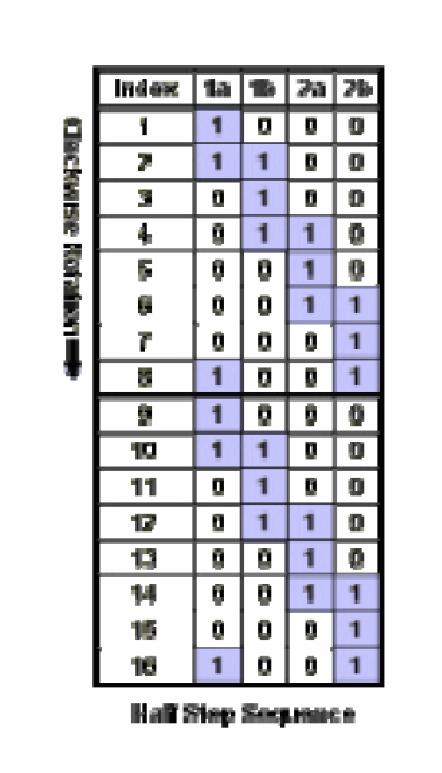
المحرك يمكن أن يكون نصف خطوي. والتحرك النصف خطوي ممكن أن يتم بتغذية وشيعة واحدة وبعدها وشيعتين ومن ثم وشيعة واحدة أيضاً. بتتابع كالمعروض في الأسفل هذا المشروع يستخدم محرك نصف خطوي ويتم مناقشته بشكل تفصيلي لاحقاً في هذا البحث. ويبين الجدول التالي طريقة القيادة كنصف خطوة.
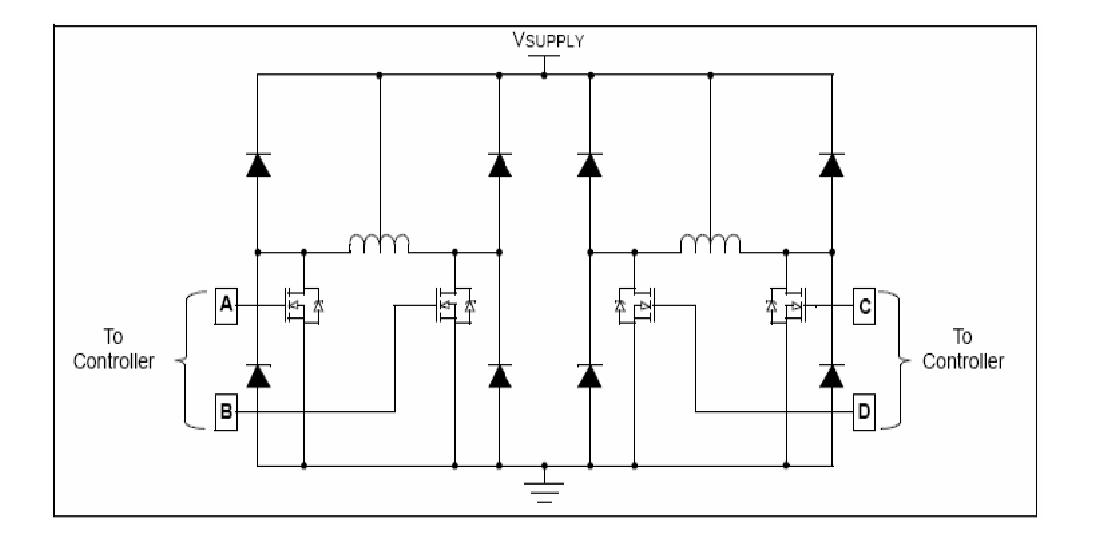
وأخيراً نحتاج إلى دارة من اجل قيادة المحرك الخطوي. والدارة الأساسية من أجل مثل هذه العملية من التحكم مبين بالشكل التالي أما الدراة الخاصة من أجل هذا التطبيق فهي موضحة ومشروحة لاحقاً.
1-2آلية بناء المشروع :
سنناقش في هذا القسم الطريقة التي سيتم وفقها بناء جهاز التعقب الشمسي وقد تم تجزأة هذا المشروع لقسمين وذلك لكي تكون عملية التصميم أكثر سهولة. الخطوة العملية الأولى في المشروع هي قراءة عدة قيم عن طريق الحساسات الضوئية ومقارنة هذه القيم ثم يتم اعطاء أوامر للمحرك ليقوم بتحريك النظام حسب القيم العظمى المقروءة
من قبل الحساسات والتي تقابل اتجاه الاشعاع الشمسي الأعظمي وبالتالي جهة الشمس. وباقي الأقسام من المشروع معنية بدراسة الاعتبارات لاختيار البرامج والقطع المستعملة الأنسب لتنفيذ المشروع.
2-2 تصميم الحساسات الضوئية :
كما تم الشرح سابقاً فأن جهاز التعقب الشمسي يستخدم خلايا ضوئية من نوع كبريتيد الكادميوم من أجل تحديد الشدة الضوئية. ومقاومة متممة قيمتها تساوي الـ 10 كيلو أوم وتستعمل من اجل اكمال الدراة الموضحة بالشكل السابق. في هذه الطريقة من التركيب توتر الخرج سوف يتزايد مع ازدياد الاشعاع الضوئي .
أن قيمة المقاومة المتممة يجب ان تختار على أساس تحقيق أوسع مقدار من قيم توترات الخرج.
إن قيمة مقاومة للخلية الضوئية التي تم قياسها تبعاً لنوع الاضاءة والتي هي : الظروف المعتمة، الاضاءة المتوسطة، الاضاءة الساطعة معطاة بالجدول التالي:
|
المقاومة المقاسة |
نوع الاضاءة |
|
50 كليو أوم |
الظلام ” وضع قماش أسود على الخلية الضوئية” |
|
4.35 كيلو أوم |
متوسطة ” الاضاءة العادية في الغرفة “ |
|
200 أوم |
الساطعة ” توجيه مصباح ضوئي على الخلية “ |
وفي حال اختيار مقاومة متممة 10 كيلو اوم سوف ينتج لدينا قيم توترات كالتالي :
Minimum = 5 V × (10 KΩ / (10 KΩ
+ 50 KΩ)) = 0.83 V
Maximum = 5 V × (10 KΩ / (10 KΩ + 4.35 KΩ)) = 3.48 V
لذا فإن تأرجح قيمة الخرج هو 2.65 فولت. وهذه القيمة ليست مثالية ولكنها تعتبر كافية ولا نحتاج إلى قيم أكبر في هذا المشروع .
3-2 المتحكم المايكروي :
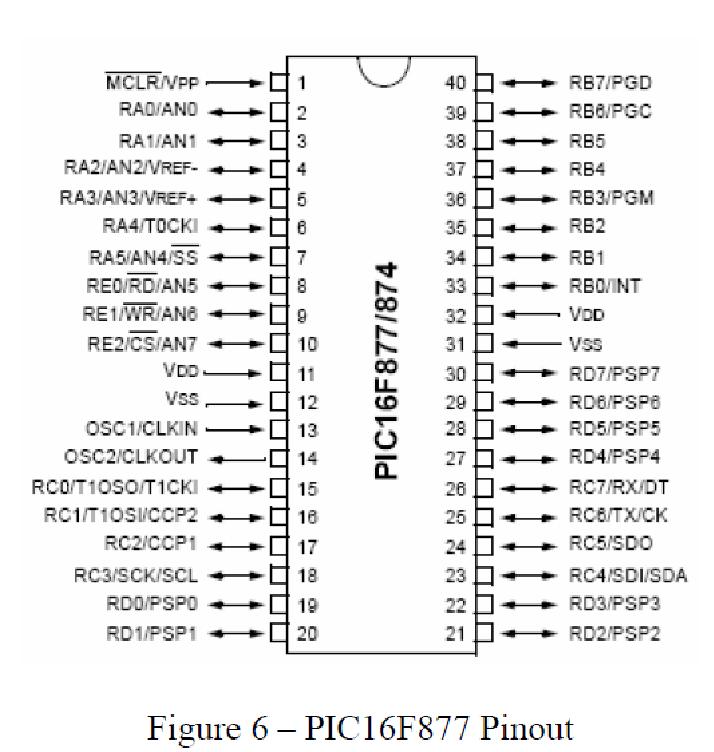
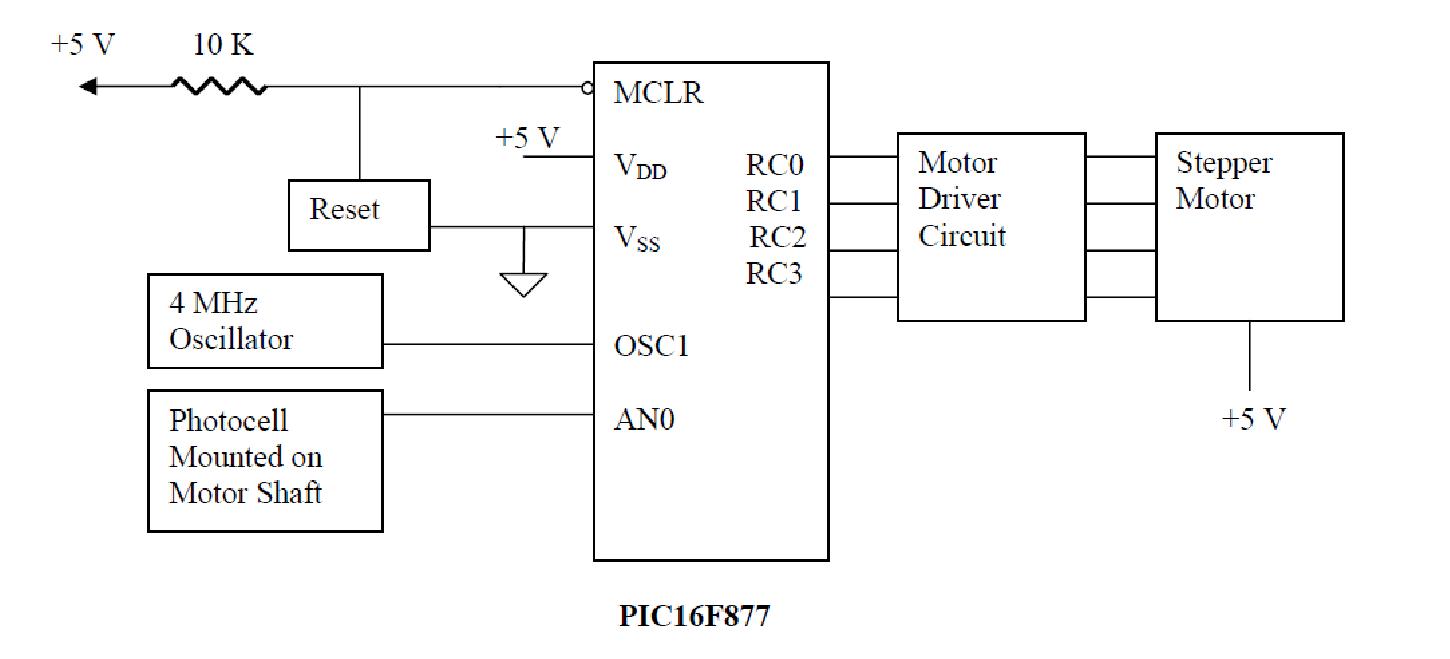
بما أن المشروع يركز على نظام التحكم المتكامل فإن المتحكم المايكروي هو من أساس النظام. أن المتحكم المستخدم في هذا المشروع يجب أن يحول التوتر التماثلي من خرج الخلية الضوئية إلى قيم رقمية وأن يوفر أربع مخارج من أجل التحكم بدوران المحرك. المتحكم من النوع PIC16F877
قد تم اختياره لانه يلبي هذه الحاجات وبالاضافة إلى انه كثير التواجد وسهل الاستخدام, وأيضاً يمتلك هذا المتحكم الميزات الثلاثة التالية والتي تساعد على تحقيق الهدف من المشروع :
1- محول متعدد القنوات من تماثلي إلى رقمي ذو 10 بت.
2- 5 مداخل ومخارج.
3- ذاكرة من نوع EEPROM ذات 256 x 8 بايت.
يتم وصل مهتز كرستالي مع المتحكم الميكروي من أجل توفير نبضات التوقيت المطلوبة. هذه السرعة هي كافية من أجل هذا التطبيق ويبن الشكل التالي مخطط تفصيلي للمتحكم PIC16F877.
3- دارة القيادة والمحرك الخطوي:
لقد تم اختيار محرك خطوي وحيد القطبية من أجل تحريك حساسات نظام الملاحقة. و قم قد ذكرنا سابقاً فان اختيار المحرك الخطوي كان بسبب دقة في العمليات التي تحتاج إلى التحريك الدقيق, بالاضافة إلى ذلك فإن دارت التحكم ليست معقدة في حال كون المحرك وحيد القطبية. المحرك الذي استخدم في هذا المشروع هو عبارة عن محرك ذو
دخل 5 فولت وخطوة بمقدار 7.5 درجة وهو رباعي الأشواط وأحادي القطبية. كما أن المحركات النصف الخطوية تحقق دقة أكثر في التحريك. وهذا يؤدي إلى 3.75 درجة بالخطوة. وتتابع العمل المستخدم موضح بالشكل التالي:
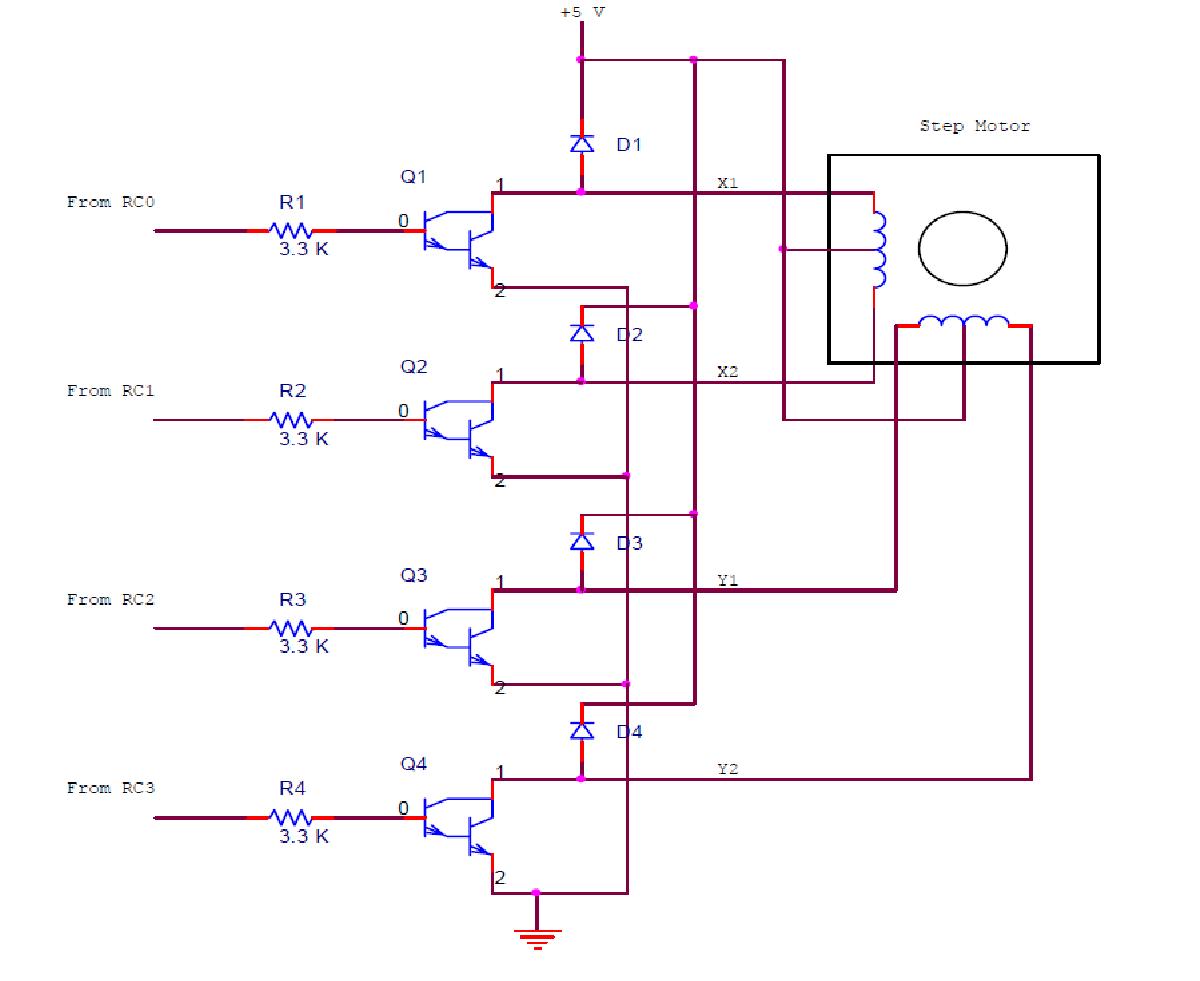
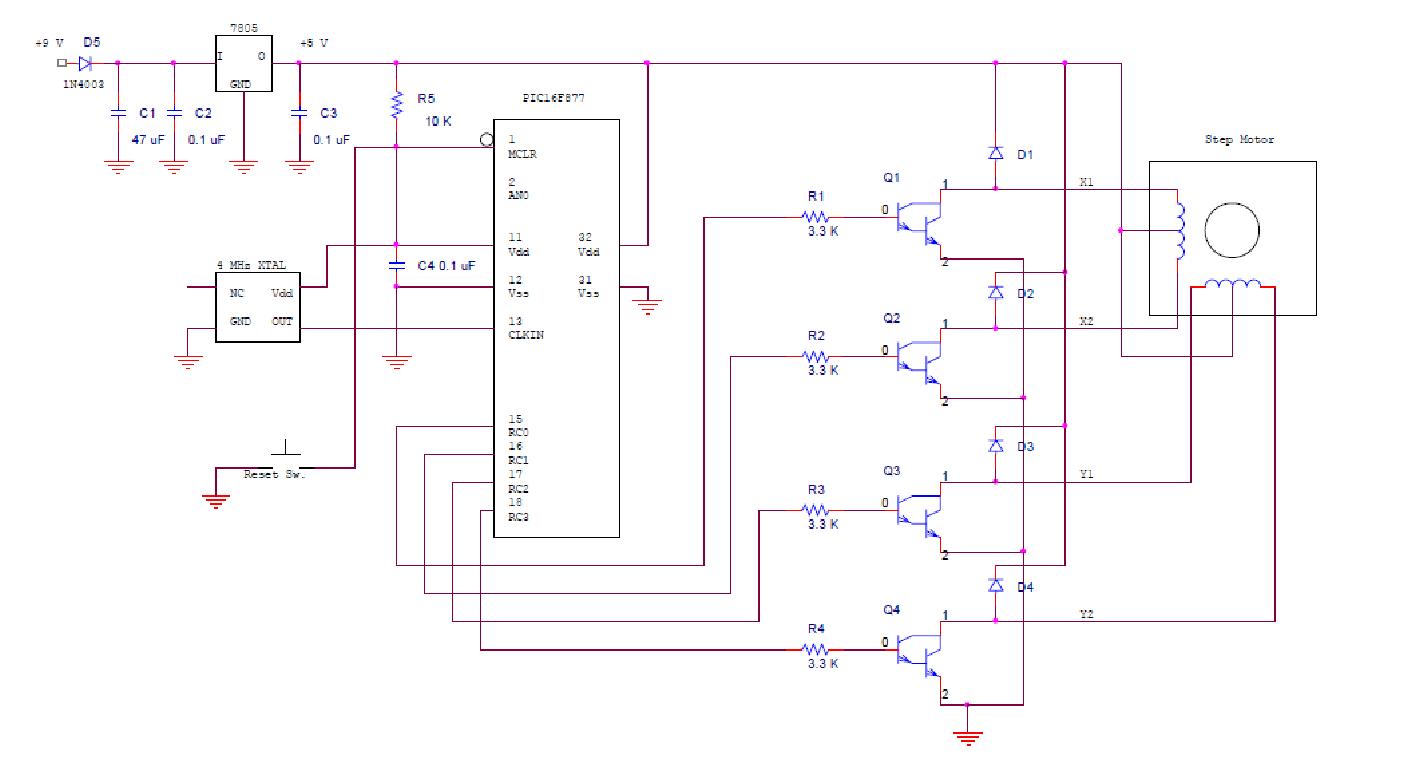
والمخطط التالي يوضح دارة قيادة المحرك الخطوي, إن هذا التصميم وبرنامج قيادة المحرك المرافق لهذا التصميم معتمد على برنامج لاب 8. ترانزستورات دارلينغتون تم اختيارها من أجل أن تستخدم مع دارة قيادة المحرك. كل ترانزستور موصول مع مقاومة 3.3 كيلو أوم إلى خرج يستخدم من اجل وصل أو فصل التيار إلى وشائع
المحرك. هذه يعطي التتابع المناسب من أجل تدوير المحرك مع أو عكس عقارب الساعة.
الديودات التي تصل المجمعات إلى التغذية الموجبة تحمي الترانوستورات من التيارات العكسية.
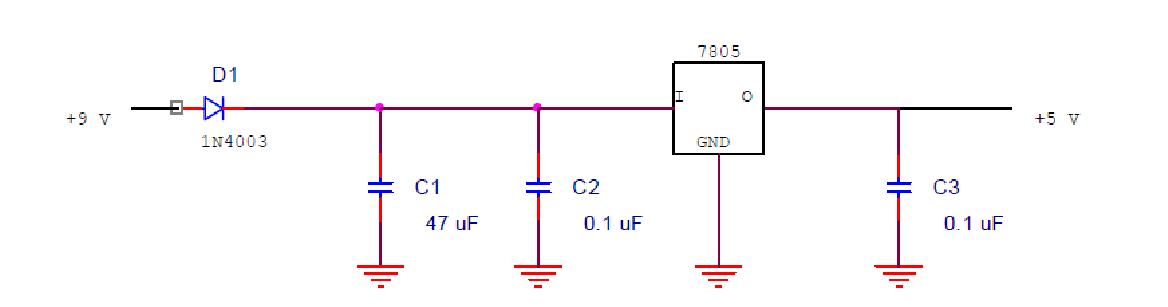
إن هذا المتحكم يحتاج إلى منظم توتر ذو النوع 7805 والذي يثبت قيمة التوتر على الـ 5 فولت ويوضح الكشل التالي دراة مستخدمة من أجل تنظيم التوتر والتي تقوم بتحويل توتر منبع ذو قيمة 9 فولت إلى قيمة 5 فولت لتغذية المتحكم.
1-3 الانشاء:
أخيراً فان جميع الأجزاء الثانوية المذكورة في الفقرة 3-1 إلى الفقرة 3-3 هي عبارة عن أجزاء مكملة لعمل النظام الشكل التالي يبين الشكل النهائي للمشروع بينما يبن الشكل الذي يليه الشكل الكامل لجميع التجهيزات المستخدمة في المشروع.
بعض تفاصيل الانشاء التي تستحق الذكر والتي تتعامل مع المحرك والخلية الضوئية:
المحرك ركب على لوح بلاستيكي مثقب باستخدام براغي معدنية من أجل الحصول على تثبيت متين.
الخلايا الضوئية تم تثبيتها على لوح خشبي والذي وصل بدوره إلى عمود المحرك.
وفي النهاية تم اضافة كبسة اعادة الوضع من أجل السماح للمتحكم المايكروي للعودة إلى وضعه البدائي بعد أن بدخل في وضعية القيلولة.
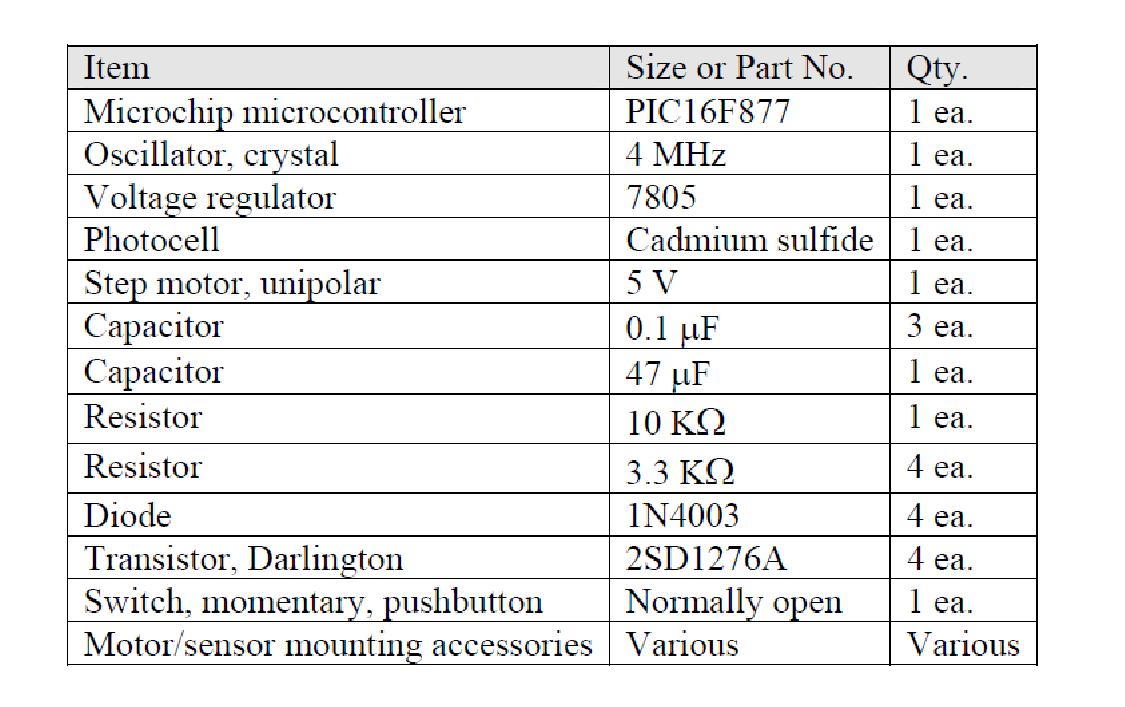
ويوضح الجدول التالي جميع الأجزاء المستخدمة في المشروع :
5- البرنامج وطريقة عمل النظام:
أن طريقة عمل المشروع السابق تعتمد بشكل أساسي على لغة الألة وهي كان أكثر من مناسبة من أجل عمل المشروع وزيادة المعرفة والتعمق بلغات البرمجة. ويمكن تقسيم عمل البرنامج إلى أربعة أجزاء رئيسية والتي هي :
الجزء الأول والذي يتعامل مع التموضع:
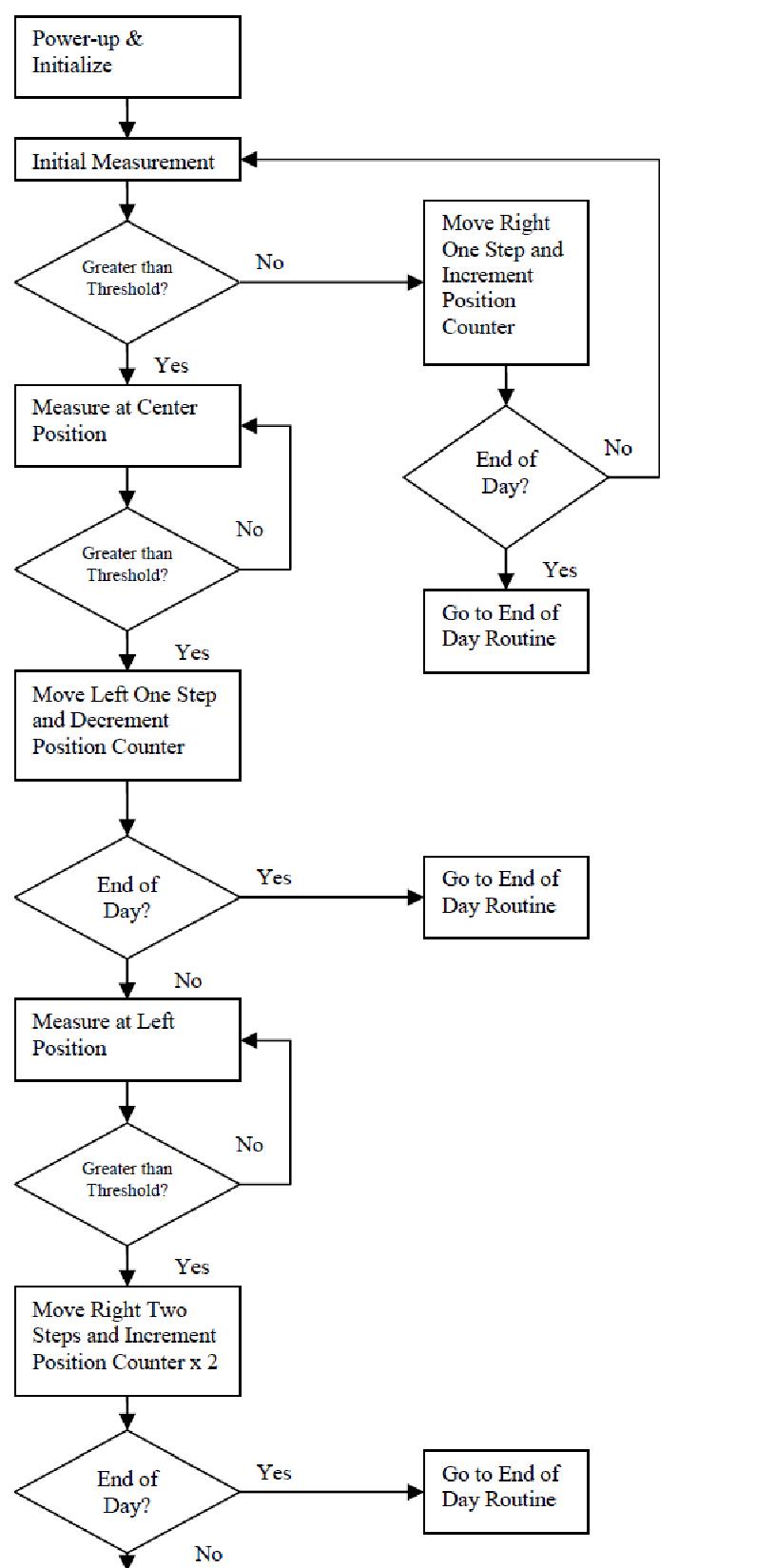
قبل تغذية النظام فإن الخلايا الضوئية يجب أن تكون موجهة يدوياً إلى نقطة البداية والتي هي نقطة سطوع الشمس. وبعد أن يوجه النظام إلى هذه النقطة فإن حساسات نظام الملاحقة سوف تتحرك 3.75 درجة كخطوة بالثانية باتجاه عقارب الساعة حتى تصبح قيمة الاشعاع الضوئي أكبرمن القيمة المعير عليها النظام مسبقاً. القيمة المعيرعليها النظام تقابل توتر مرجعي 4.60 فولت.حيث اختيرت هذه القيمة لكي تتوافق مع توتر الخلية الكهروضوئية في حال كانت مغطاة وموجهة باتجاه أشعة الشمس. هذه القيمة تضمن أن نظام التتبع الشمسي سوف يلاحق قيمة عظمى للاشعاع الشمسي.
الجزء الثاني من البرنامج يتعامل مع الملاحقة الضوئية:
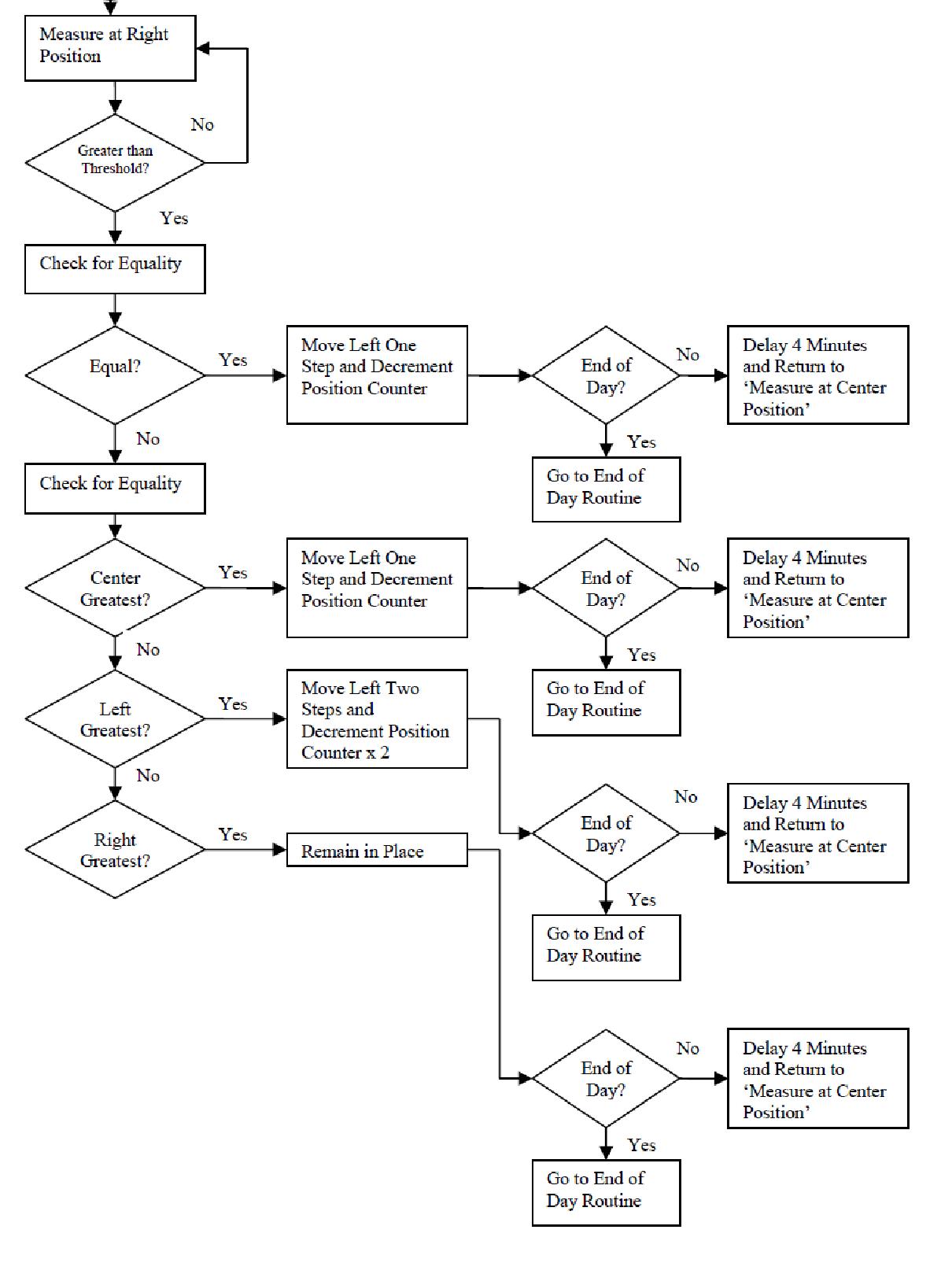
وهذا الجزء هو لب البرنامج, بعد أن يتم تعير الموضع البدائي لنظام الملاحقة بواسطة مصدور ذو شدة اضاءة عالية ” الشمس” يصبح جاهزاً عندها لتعديل نفسه بدقة أكثر ومتابعة الضوء. المتابع يقيس في البداية شدة الضوء في المكان الموجود فيه وبعدها يتحرك بعكس عقارب الساعة بمقدار 3.75 درجة ثم يقوم بقياس قيمة
الاشعاع عندها, بعدها يتحرك مع عقارب الساعة بمقدار 3.75 درجة ويأخذ قراءة أخيرة. ويقوم البرنامج بمقارنة القيمتين ومن ثم يتحرك باتجاه النقطة ذات قيمة الاشعاع الشمس الأكبر ويقف عندها. في حال تساوي القيمتين سوف يعود النظام إلى النقطة السابقة التي بدء عندها ويعيد عملية القياس من جديد وذلك بعد مضي أربعة دقائق قبل
أن يقيس من جديد وهذه الزمن مأخوذ من حقيقة أن الشمس تتحرك بمقدار درجة واحدة كل أربعة دقائق .
الجزء الثالث من البرنامج يتعامل مع التحسس للضوء الضعيف:
وهو يشابه العملية المذكورة بالجزء السابق, حيث اذا كانت كثافة الضوء أقل من عتبة الضوء الدنيا سوف يستمر الملاحق بالقياس في الموضع الذي هو فيه والتحرك حتى يصل إلى قياس يساوي عتبة الضوء الدنيا.
وهذا القيمة في البرنامج اسندت لتقابل توتر مقداره 3.75 فولت. وهذه القيمة تتناسب مع القيمة التي تم قياسها من قبل خلية ضوئية مظللة في يوم غائم وهي تلائم أوضاع الاشعاع في الايام الغائمة .
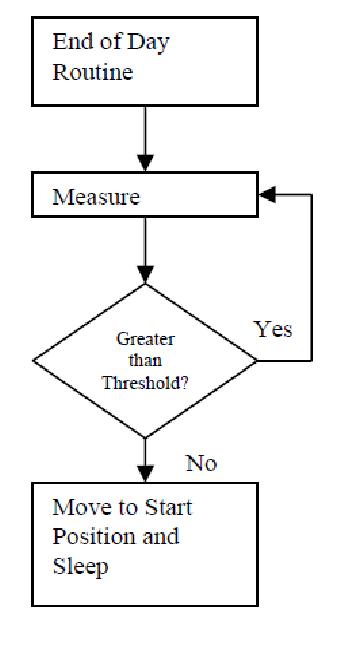
القسم الأخير من البرنامج يتيح لنظام المتابعة من أن يعيد نفسه في نهاية اليوم:
بعد كل حركة يقوم بها المحرك يتزايد أحد المتحولات أو يتناقص تبعاً من أجل معرفة الموقع الدقيق الذي وصل إليه
النظام في أي وقت. بعد أن يقوم المتعقب بالدوران 180 درجة يتم التحقق من كثافة الضوء. اذا كانت قيمة كثافة الضوء تقابل قيمة توتر أقل من توتر العتبة الدنيا والتي هي 3.75 فولت كما ذكرنا سابقاً سيعود المتعقب إلى مكانه البدائي ويدخل في وضع الغفوة. واذا كانت القيمة أعلى من العتبة الدنيا سيستمر المتعقب بالقياس حتي
تصل القيمة المقاسة أقل من العتبة الدنيا. وفي الوقت الذي يدخل فيه النظام حالة الغفوة يمكن اعادته إلى وضعه البدائي عن طريق مفتاح يدوي. والشكل التالي يوضح الخوارزمية التي تمثل عمل البرنامج.
6- تحليل التصميم والنتائج :
ان البرنامج والتركيب للمشروع تم تقسيمها إلى مراحل أثناء تطوير النظام والية عمله ككل. وكانت هذه الأقسام هي عبارة عن التحسس للضوء , قيادة المحرك , برنامج الملاحقة , والتحسينات البرمجية. إن تقسيم طريقة عمل البرنامجوتبسيطه جعلت البرنامج أقصر ويحتاج زمن أقل عند التنفيذ. وهذا البرنامج حقق الهدف المطلوب منه عند البدء بالمشروع. ولكن كانت المشكلة في العتاد الصلب ” التجهيزات ” . المشكلة الأولى كانت عند تحرك النظام وتأثيره على الأسلاك الوصلة بين الخلية الضوئية والمحرك والإلتواءات الناتجة على هذه الأسلاك أثناء الحركة. هناك سلكان موصلان إلى الخلية الضوئية ومثبتان على محور المحرك. حالما يتحرك المتعقب من 30 إلى 45 درجة تسبب هذه الأسلاك عزماً معاكساً يسبب انزلاقاً للمحرك. وهذا يسبب بدوره تموضع خاطئ للنظام. والحل
لهذه المشكلة كان عن طريق تثبيت أسلاك الحساس الضوئي إلى الجزء الخلفي من الحساس أثناء حركة النظام.
المشكلة الثانية تتعامل مع الحساس الضوئي. حيث قد تم اكتشاف أن الخلية تحتاج إلى حاجب ضوئي من أجل تركيز الأشعة الساقطة عليها بشكل حزمة. وقد تم حل هذه المشكلة عن طريق احاطة الخلية بماسورة سوداء من أجل الحصول على قناة توصل الضوء إلى مركزها وتمنع الضوء من السقوط عليها من جميع الاتجاهات.
7- تطوير الجهاز في المستقبل :
الهدف من المشروع كان الحصول على النتائج المطلوبة في الزمن المخصص له. ولهذا فإن العديد من التعديلات قابل للتطبيق على التصميم الأولي. وهذا ما يوضح أن هذا النظام هو نظام تجريبي ويمكن اجراء العديد من التعديلات عليه. والأفكارا لتالية هي بعض الأفكار القابلة للتطبيق في هذا المجال:
1- علاج لمشكلة التواء الأسلاك والمرتبطة بالخلايا الضوئية يمكن وضع زيت للتشحيم على المحور أو استخدام محور بعزم أكبر أو تقصير طول الأسلاك.
2- زيادة مجال التحسس والدقة للنظام عن طريق استخدام خلايا ضوئية ذات حساسية أعلى كاستخدام حساسات ضوئية ذات دارات مضخمة للإشارة مما يتيح دقة أكثر في المتابعة.
3- يمكن استخدام مصفوفة ترانزستورات من نوع دارلينغتون ذو رقم UCN5804 من أجل اقلال عدد العناصر المستخدمة في النظام.
4- يمكن تطبيق هذا النظام على محورين من أجل زيادة الدقة في الملاحقة وزيادة المردود.
8-الاستنتاجات :
هذا البحث يوضح طريقة بناء نظام ملاحقة شمسي من عن طريق استخدام نظام بمعالج مايكروي. وهو أيضاً يوضح حل برمجي مناسب من أجل زيادة مردود الأنظمة الشمسية إلى قيمة عظمى عن طريق توجيه النظام إلى نقطة الاشعاع الشمسي الأعظمي ومن ثم العودة إلى الوضع البدائي بعد غياب الشمس من أجل يوم جديد.
9-المصادر:
Solar Tracker, Bill Lane, Cleveland State University ,April 30, 2008
يمكن قراءة البحث وتحميله كاملأ مع ملحق برمجة المعالج المايكروي بصيغة PDF من الرابط التالي:






المجهوود فعلا رائع و مفيد جداا …بس المشكلة الصور مش موجودة والpdf ?
جزاك الله كل خير على هذه المعلومات المفيدة .. اود الاستفسار هنا : عدد الحساسات الضوئية هو واحد ام اثنان ؟ ولماذا لايتستخدم حساسان وتتم مقارنة الجهود بينهما وتدوير المحرك على اساس القراءة وذلك حتى يتم الحصول على تطابق في الجهود مابين الحساسين .. ولكم الشكر
تشكر مجهود رائع